TensorBoard 分析
從訓練曲線到最終 scorecard
直接讀 TensorBoard event 檔(RL_Labcowork/output/**/tb)整理出的圖表,把「reward 會騙人 → 指標互相 trade-off → 用 scorecard 共同檢查」這條主線用數據呈現。點圖可放大。
困境一 · Reward 高 ≠ 步態可信
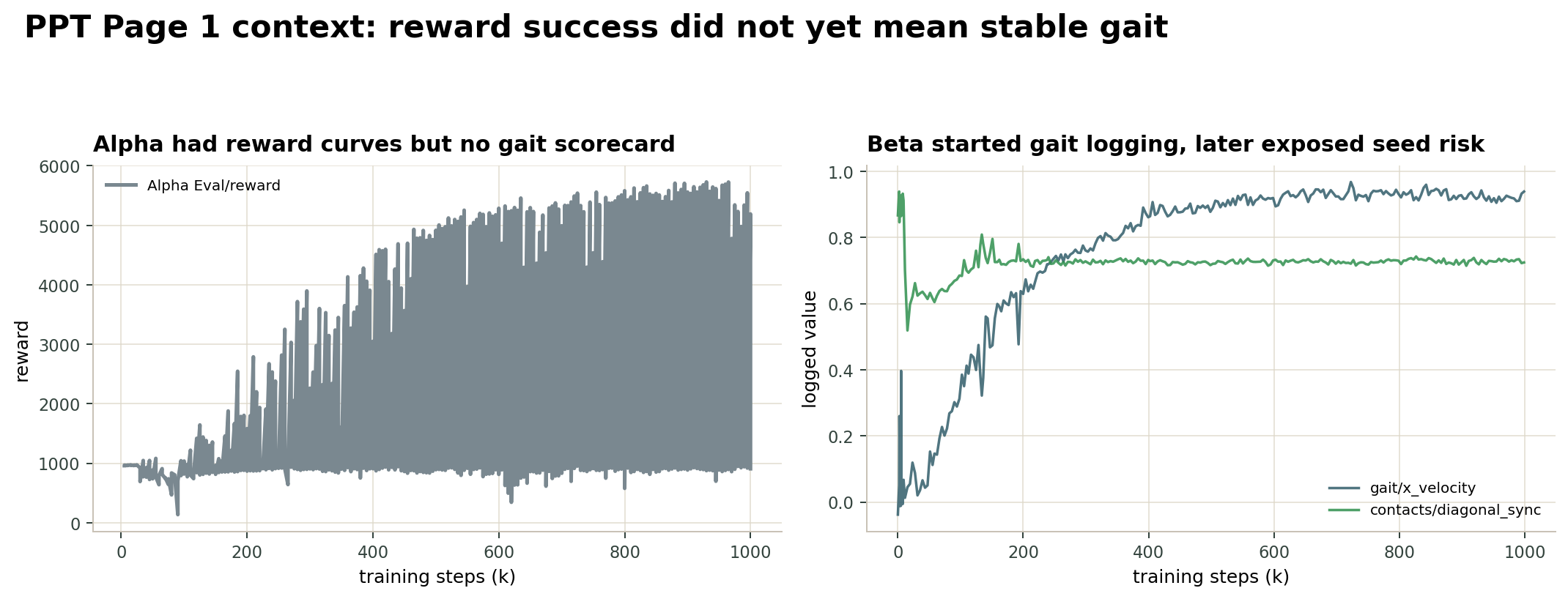
Alpha 有 reward,卻沒有步態 scorecard
左圖:Alpha 自寫 TD3 的 Eval/reward 一路上升,能確認模型有在學——但回答不了「是否自然、穩定、省力地走」。
右圖:Beta 改用 SB3 + RealisticGaitWrapper 後開始記錄 gait/x_velocity、contacts/diagonal_sync,主觀也最自然;但 multi-seed 才暴露 seed 1/2 會 fast-fall。
- Alpha:看得到 reward,沒有同規格 gait 指標。
- Beta:自然基準成立,但 seed 穩定性不足。
困境二 · 指標不會同時最佳
各分支的評估曲線
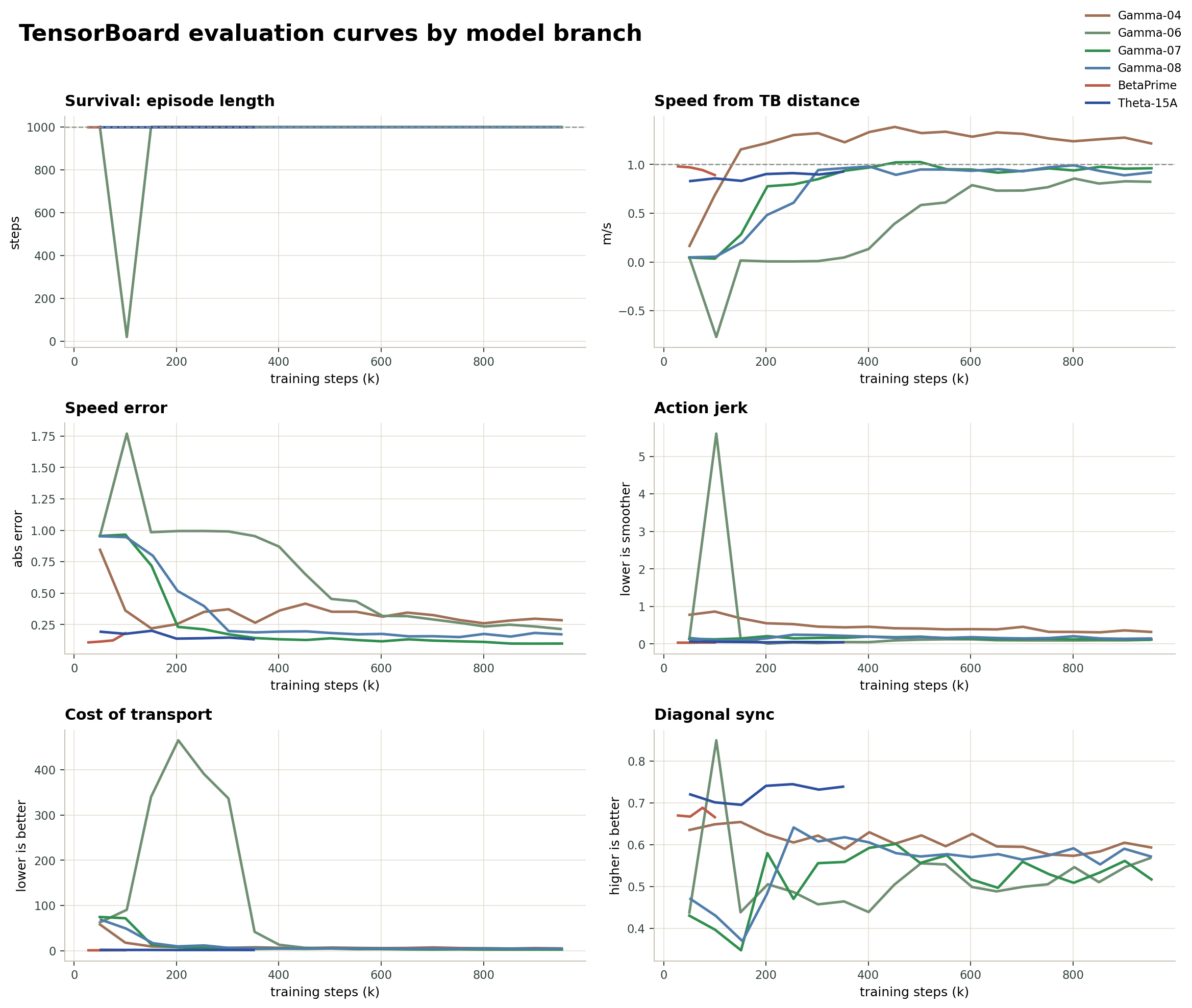
六張子圖(存活步數、速度、速度誤差、jerk、CoT、對角同步)對照 Gamma 04 / 06 / 07 / 08、BetaPrime 與 Theta-15A。
存活步數幾乎都能很快穩到 1000,但速度、jerk、CoT、diagonal_sync 不會同時收斂到最佳——這正是要建立九大指標的原因。
註:Gamma-05 本機無 event 檔,曲線不含 05。
為什麼單一指標不夠
Trade-off 散布圖
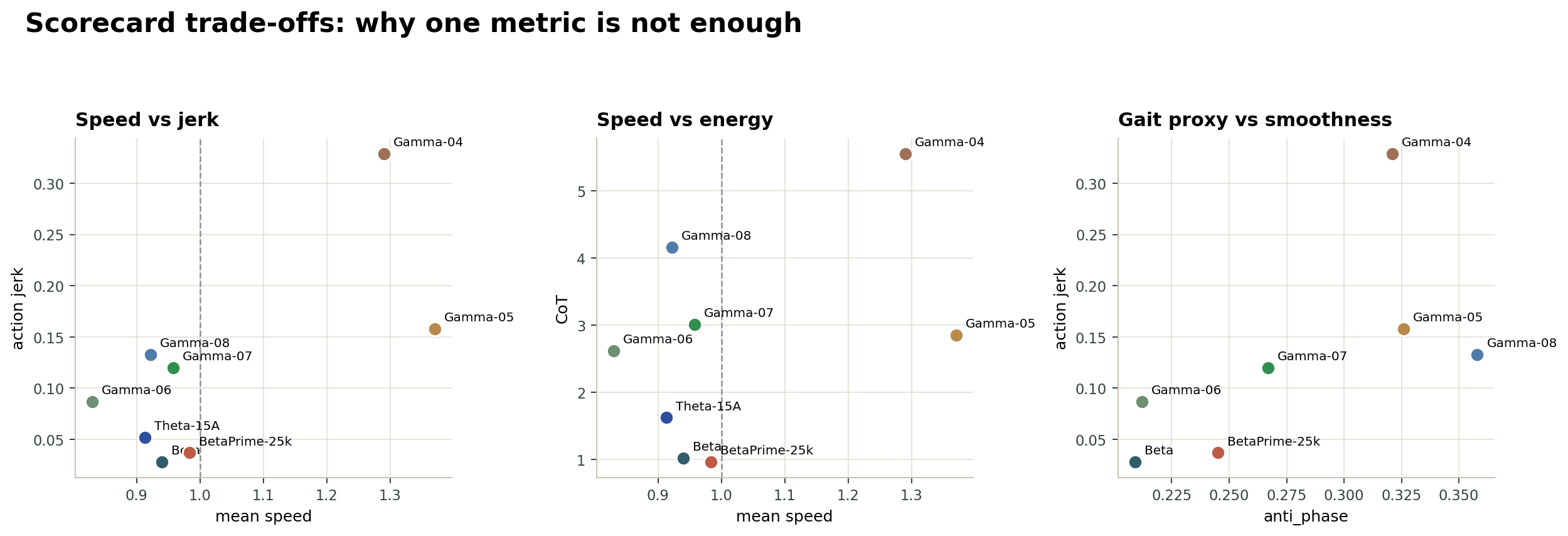
三張散布圖:速度 vs jerk、速度 vs 能耗(CoT)、步態代理(anti_phase)vs 平滑(jerk)。
Beta、BetaPrime-25k、Theta-15A 聚在低 jerk/低 CoT 的甜蜜區;Gamma 系列即使某些單項突出,仍被拉到高能耗或高抖動。
- 速度準 ≠ 最平滑。
- anti_phase / regularity 漂亮 ≠ CoT 與觀感最好。
解決 · 用 scorecard 共同檢查
最終模型 scorecard 比較
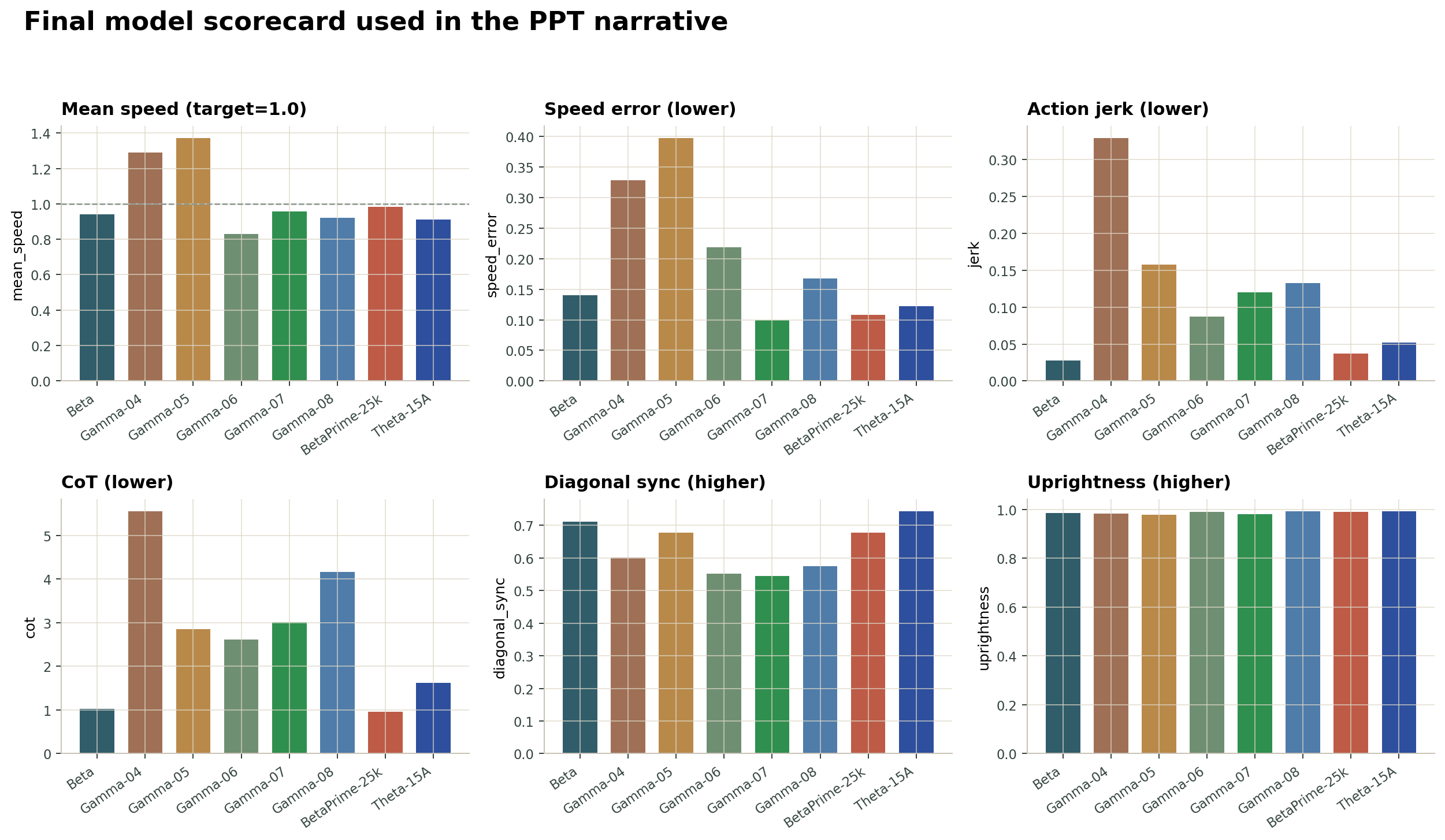
六項指標長條圖(速度、速度誤差、jerk、CoT、對角同步、直立度)並排所有版本;最終不靠單一 reward,而是九項一起看:
- BetaPrime-25k:速度最準(0.983)、CoT 最低(0.960)。
- Theta-15A:對角同步最高(0.744)、直立度最高(0.991),穩定走滿 1000。
- Gamma-04 / 05 雖走得久,但速度誤差與 jerk 明顯偏高。